SwRI demonstrates drone autonomy technology
November 29, 2021, 9:30AMNuclear News
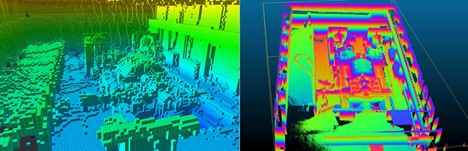
SwRI engineers used LIDAR point cloud data to reconstruct a high-resolution image of a facility that houses electric turbines at the nuclear power plant. 3D cubes, or voxels, on the left provide spatial information on the turbine facility. Point clouds were reconstructed to create the high-resolution image of the turbines on the right. SwRI specializes in data visualizations to identify damage and potential hazards following accidents at nuclear power plants and other hazardous facilities. (Graphic: SwRI)
During the EnRicH 2021 European Robotics Hackathon, Southwest Research Institute’s unmanned aircraft system (UAS or drone) explored and mapped the interior of a nuclear power plant, detecting radiation sources autonomously, without the aid of a human pilot.
SwRI’s UAS technology can potentially assist in life-saving search-and-rescue missions and hazardous inspections at industrial facilities and infrastructure following natural disasters and other incidents.
To continue reading, log in or create a free account!